




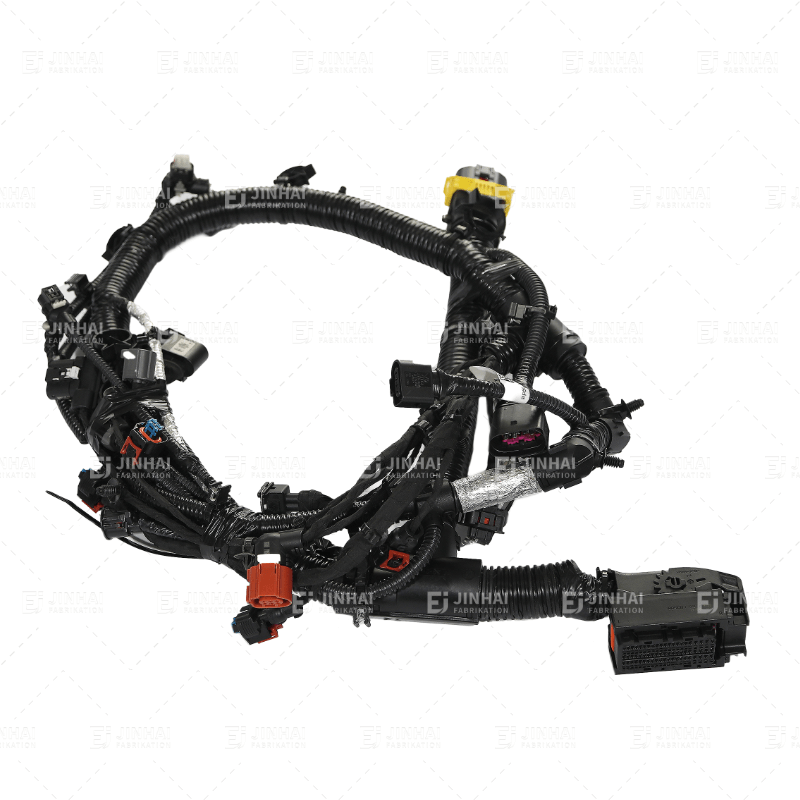











Automotive Engine Wiring Harness Communication Standards
Automotive Engine Wiring Harness communication standards mainly include two protocols: CAN (Controller Area Network) and LIN (Local Interconnect Network).
| Performance | LIN | CAN |
| Medium Access Control | Single Master | Multiple Master |
| Typical Bus Speed | 2.4 to 19.6 kbd | 62.5 to 500 kbd |
| Multicast Message Routing | 6-bit ldentifier | 11/29-bit ldentifier |
| Typical Number of Nodes | 2 to 10 Nodes | 4 to 20 Nodes |
| Encoding | NRZ 8N1 (USART) | NRZ with Bit Stuffing |
| Data Byte per Frame | 2,4,8 Byte | 0 to 8 Byte |
| Transmission Time for
4 Data Bytes |
3.5 ms at 20 kbd | 0.8 ms at 125 kbd |
| Error Detection | 8-bit Checksum | 15-bit CRC |
| Physical Layer | Single Wire, Vbat | Twisted Pair, 5V |
| Clock Generation | Master:Crystal,Slaves:RC/Resonathoặc | Crystal |
| Relative Cost per Node | 0.5 | 1 |
CAN and LIN are suitable for different scenarios in engine compartment wiring harness communication. CAN is used for high-speed, high-reliability key engine control systems, while LIN is used for auxiliary systems of modules with low real-time requirements, such as body control (such as windows and wipers).
Liên hệ với chúng tôi Liên hệ ngay với chúng tôi để tìm hiểu cách chúng tôi có thể đáp ứng các yêu cầu về cáp và dây dẫn của quý khách. Theo dõi chúng tôi trên YouTube. .










