










Automotive Engine Wiring Harness Communication Standards
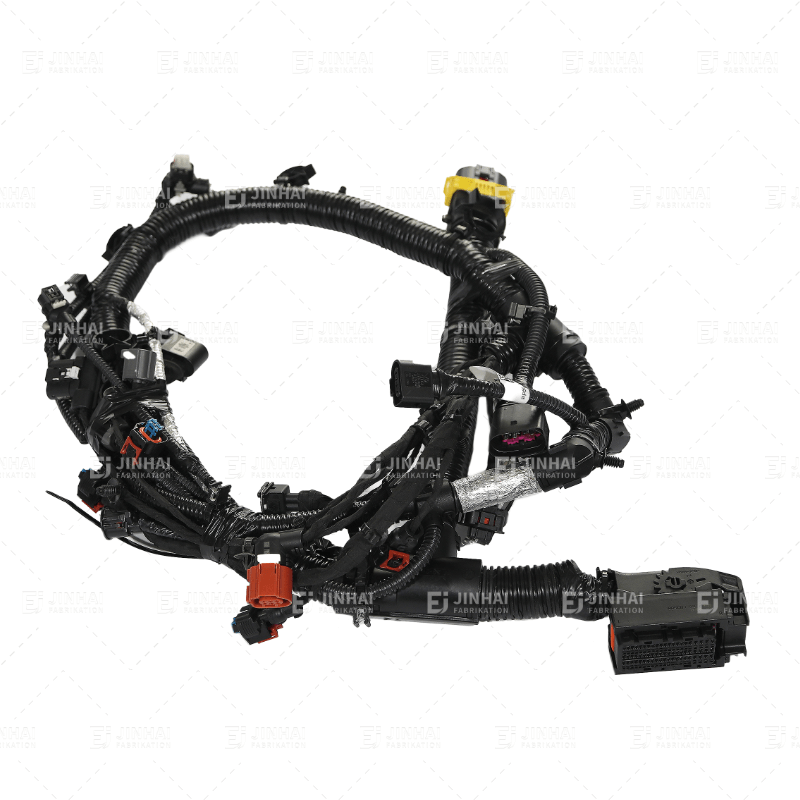
Automotive Engine Wiring Harness communication standards mainly include two protocols: CAN (Controller Area Network) and LIN (Local Interconnect Network).
| Performance | LIN | CAN |
| Medium Access Control | Single Master | Multiple Master |
| Typical Bus Speed | 2.4 to 19.6 kbd | 62.5 to 500 kbd |
| Multicast Message Routing | 6-bit ldentifier | 11/29-bit ldentifier |
| Typical Number of Nodes | 2 to 10 Nodes | 4 to 20 Nodes |
| Encoding | NRZ 8N1 (USART) | NRZ with Bit Stuffing |
| Data Byte per Frame | 2,4,8 Byte | 0 to 8 Byte |
| Transmission Time for
4 Data Bytes |
3.5 ms at 20 kbd | 0.8 ms at 125 kbd |
| Error Detection | 8-bit Checksum | 15-bit CRC |
| Physical Layer | Single Wire, Vbat | Twisted Pair, 5V |
| Clock Generation | Master:Crystal,Slaves:RC/Resonator | Crystal |
| Relative Cost per Node | 0.5 | 1 |
CAN and LIN are suitable for different scenarios in engine compartment wiring harness communication. CAN is used for high-speed, high-reliability key engine control systems, while LIN is used for auxiliary systems of modules with low real-time requirements, such as body control (such as windows and wipers).
Contact us immediately to learn how we can meet your cable and harness requirements. Follow us on Youtube .


























